基于PSoC芯片的倒车雷达控制系统设计
随着汽车保有量的持续增长和城市停车环境的日益复杂,驾驶安全,尤其是倒车安全,已成为公众关注的焦点。倒车雷达作为一项重要的汽车主动安全辅助技术,能够有效探测车辆后方障碍物,并通过声光等方式及时预警,极大地降低了倒车事故的发生率。传统的倒车雷达控制系统多采用通用微控制器(MCU)搭配分立模拟电路实现,存在设计复杂、灵活性差、成本较高等问题。本文提出一种基于赛普拉斯(Cypress)可编程片上系统(PSoC)芯片的新型倒车雷达控制系统设计方案。PSoC芯片集成了可配置的模拟和数字外设、内存以及微处理器核心,其高集成度与可编程特性为简化系统设计、提升性能与灵活性提供了理想平台。
一、系统总体设计
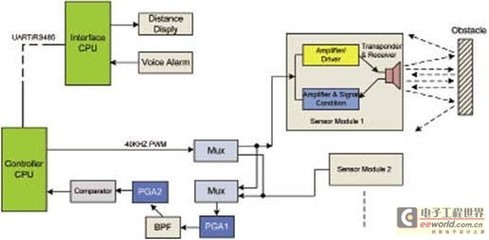
本倒车雷达控制系统主要由超声波传感器阵列、以PSoC为核心的主控模块、报警显示模块以及电源管理模块构成。系统工作流程如下:PSoC主控芯片周期性地驱动超声波发射探头发出脉冲信号,并同步启动内部高精度定时器。当超声波遇到障碍物反射后,被接收探头捕获。PSoC内置的可编程模拟前端对回波信号进行放大、滤波和比较,生成数字边沿信号。主控芯片通过捕获该边沿信号,计算发射与接收的时间差,结合声速即可精确计算出车辆与障碍物之间的距离。系统根据预设的安全距离阈值,通过PWM驱动蜂鸣器发出频率渐变的报警声,并通过LED阵列或LCD显示屏实时显示距离信息与方位提示。
二、核心硬件设计:PSoC的优势应用
- 模拟前端集成:PSoC芯片内部集成了可编程增益放大器(PGA)、滤波器、比较器和模数转换器(ADC)等模拟组件。在本设计中,可直接配置PGA对微弱的回波信号进行放大,利用片内滤波器抑制环境噪声,并通过比较器生成精准的触发信号,省去了大量外围分立元件,简化了PCB布局,提高了系统的抗干扰能力和可靠性。
- 数字系统定制:PSoC的数字系统由可编程数字模块(UDB)构成。我们可以利用UDB灵活地实现精准的脉冲发生器(用于驱动超声波发射)、高分辨率定时器/计数器(用于时间测量)以及PWM控制器(用于驱动蜂鸣器和LED)。所有数字功能均在芯片内部通过图形化或硬件描述语言配置完成,无需外部逻辑芯片,实现了真正的片上系统(SoC)设计。
- 混合信号处理能力:PSoC内核(如ARM Cortex-M系列)负责整体的算法控制与逻辑判断,而其独特的可配置模拟与数字资源并行工作,使得信号采集、处理与响应几乎可以同步进行,极大提升了系统的实时性能,确保报警的及时性。
三、软件与算法设计
系统软件在PSoC Creator集成开发环境中进行开发。主要任务包括:
- 传感器轮询驱动:以多路复用方式顺序驱动四个角度的超声波探头,实现全方位探测。
- 精准测距算法:采用温度补偿算法动态校准声速,提高不同环境下的测距精度。通过数字滤波算法(如中值滤波)处理多次测量数据,抑制偶然误差。
- 智能报警策略:根据距离远近,动态调整蜂鸣器PWM信号的频率和占空比,实现“慢响-急响”的梯度报警。可通过I2C或UART接口控制LCD屏,以数字或模拟条形式图形化显示各方向距离。
- 自检与故障诊断:系统上电时自动检测传感器连接状态,并在运行中监控信号质量,对异常情况(如探头污损、失效)进行提示。
四、系统测试与优势
经实际搭建原型系统测试,本设计在3米范围内测距误差可控制在±2厘米以内,响应时间小于100毫秒,完全满足倒车辅助需求。与基于传统MCU的方案相比,本PSoC方案具有显著优势:
- 集成度高,成本优化:大幅减少外围芯片与元件数量,降低BOM成本与电路板面积。
- 设计灵活,易于升级:硬件功能可通过软件重新配置,若要增加功能(如增加通讯接口)或修改参数,无需改动PCB,缩短开发周期。
- 性能可靠:片内信号路径缩短,减少了外部干扰,系统稳定性和一致性更好。
- 开发便捷:PSoC Creator工具提供丰富的组件库和直观的图形化接口,简化了混合信号系统设计的复杂度。
###
本文设计的基于PSoC芯片的倒车雷达控制系统,充分利用了PSoC高度集成、灵活可配的混合信号处理能力,构建了一个精简、高效、可靠的硬件平台。该设计不仅实现了倒车雷达的基本测距与报警功能,其灵活的架构也为未来集成更复杂的算法(如盲区监测、自动泊车辅助)预留了空间,体现了现代嵌入式设计向高集成度、智能化发展的趋势,为汽车电子控制系统开发提供了一种有价值的参考方案。
最新产品